实验八 状态反馈
1.实验原理和电路
若受控系统(A、B、C)完全能控,则通过状态反馈可以任意配置极点。设受控系统如图
8-1所示。
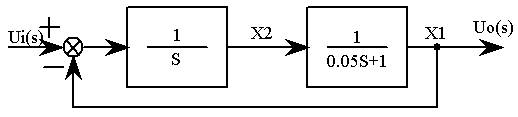
图8-1 受控系统
期望性能指标为:超调量![]() ;峰值时间
;峰值时间![]() 秒。
秒。
由
![]()
![]() 取
取![]()
因此,根据性能指标确定系统希望极点为:
图10-1受控系统的状态方程和输出方程为:
![]() (
(
式中 ,
,![]() ,
,![]() ,
,![]()
系统的传递函数为:
![]()
![]()
受控系统的能控规范形为:
 (
(
式中![]() (T为变换阵)
(T为变换阵)

![]() ,
,![]()
![]() 后,闭环系统
后,闭环系统![]() 的传递函数为:
的传递函数为:
![]()
![]() (
(
而希望的闭环系统特征多项式为:
![]()
![]()
![]() (
(
令![]() 的分母等于
的分母等于![]() ,则得到
,则得到![]() 为:
为:
![]() (
(
最后确定原受控系统的状态反馈阵![]() :
:
由于![]()
由![]() ,
,![]() 和
和![]() =求得
=求得

所以状态反馈阵为:

极点配置后系统如图8-2或图8-3所示:
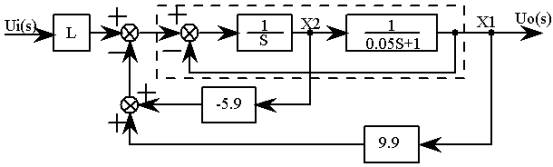
图8-2 极点配置后系统
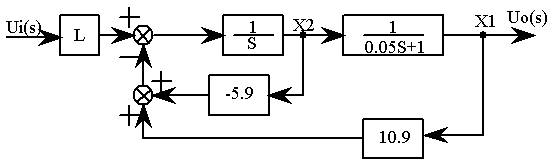
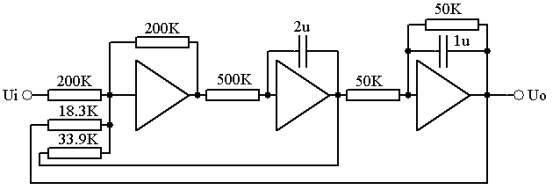
图8-3 极点配置后系统
(图中“输入增益阵”L是用来满足静态要求的,这里无静态要求,可取L=1)根据图8-3所示的系统,设计如图8-4所示的模拟电路。
2.实验内容及步骤
(1)观察极点配置前的系统的阶跃响应曲线,如图8-5所示(![]()
![]() )。
)。
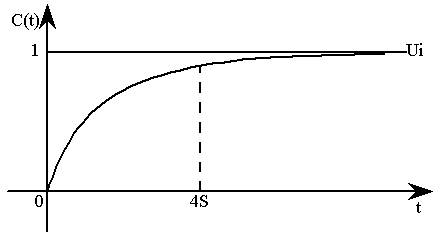
图8-5
(2)配置后的电路图8-4接线,输入阶跃信号,从示波器上可观测到的曲线如图8-6所示(![]() ,
,![]() )
)
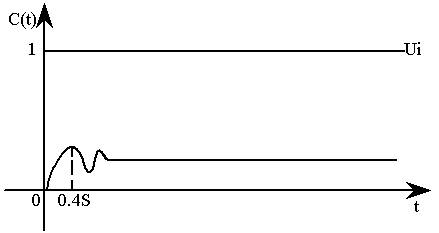
图8-6
很明显,经过极点配置后,系统的超调和峰值时间大大缩短了。