| 随动控制系统 | ||
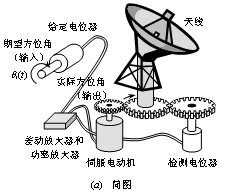
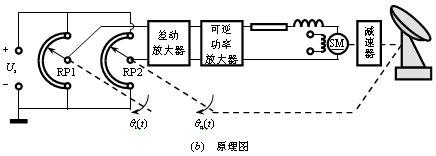
| 随动系统与上述闭环调速系统一样,都是根据反馈控制原理工作的。它们的所不同之处主要在于:随动系统的输入信号不是恒值而是随机变化的;系统的主要任务是使输出量紧紧跟踪输入量的变化,故随动系统又叫做跟踪系统。 | ||
|
||
自动控制系统的基本结构和组成单元: |
||
| (1)给定装置 其功能是,给出与期望的被控量相对应的系统输入量(即参考输入信号或给定值)。 | ||
| (2)误差检测器(或比较元件) 其功能是:将测量元件检测到的被控量的实际值,与给定装置提供的给定值(代表被控量的整定值)进行比较,求出它们之间的偏差(或误差)。 | ||
| (3)执行机构 其功能是:执行控制作用并推动受控对象,使其被控量能按照预定的规律变化。 | ||
| (4)测量元件 其功能是,检测被控制的物理量并用作反馈信号或供系统显示用。 | ||
| (5)放大元件 误差检测器位于低功率的输入端,由其提供的偏差信号通常很微弱,必须用放大元件加以放大以便推动执行机构去控制受控对象。 | ||
| (6)校正装置 由于受控对象和执行机构的特性难尽人意,在构成自动控制系统时通常需要引入校正装置对系统特性进行校正。 |