1.4.2 线性控制系统与非线性控制系统 根据系统的特性自动控制系统可分为两大类:线性控制系统(简称线性系统)和非线性控制系统(简称非线性系统)。由于这种分类方法是很基本的,而且这两类系统的基本特性是今后分析讨论的基本依据,故有必要从数学和物理两种不同的观点来加以讨论。虽然有的文献是根据组成元器件的特性来划分的,认为线性系统是由线性元件所组成的,而非线性系统则含有非线性的元件。但是这种划分有一定的片面性,因为有的系统即使含有非线性元件,在一定条件下也可视为线性系统来处理。 按数学的观点 凡是由线性函数 (包括线性微分方程、线性差分方程和线性代数方程) 描述的系统称为线性系统 ,而由非线性函数描述的系统则称为非线性系统。例如线性单变量连续系统可用下列线性微分方程来描述:
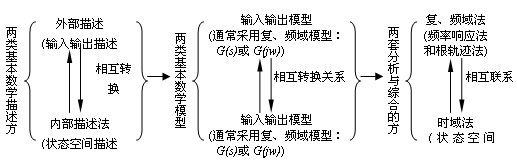
图 1.16 控制系统分类简图