1.5 对自动控制系统的基本要求 |
|
1.5.1 基本要求 (动画:直流调速系统的过渡过程)
各类控制系统都是动态系统。系统中含有储能(或储存信息)的元件,在外界输入信号作用下系统响应是一动力学变化的过程,呈现出“惯性”的特点。因此当输入量发生变化时系统的输出量从原稳态值变化到新的稳态值需经历一定的时间,这一时间叫做过渡过程时间。整个控制系统的响应过程可分为两个阶段:暂态(响应)过程(即过渡过程)和稳态(响应)过程,过渡过程结束后系统就进入稳态过程。 对稳态过程的基本要求是: 在稳态时系统输出量的实际值与希望值之差(叫做稳态误差)应很小,即系统具有较高的控制精度或控制的准确度。 |
|
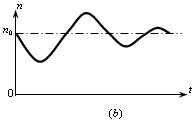
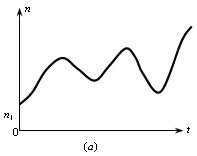
| (1) 衰减振荡过程 | |
| 若系统的惯性较小、增益又较大时,则当输入信号跃变时系统的暂态响应特性通常呈现衰减振荡的形式,如图 1.19 所示。现以给定信号的跃变为例简要说明如下:假设在给定信号ug1的作用下电机的稳态转速为n1;当给定信号由ug1跃增至另一新值时,因系统有惯性,转速和反馈信号的变化均迟后于给定信号的变化,故在暂态过程的一开始,偏差电压(ue=ug-ut1)较大且为正的,使得ua、udo迅速上升,电机受到一定的强励作用,由于系统惯性较小,增益又较大,因而系统的反应较灵敏,响应速度也较快,使得转速迅速地上升,当到达与给定信号相对应的新的稳态转速时停不下来而继续往上冲;于是出现负的偏差电压(即ue的极性变号),结果引起ua、udo、n以及ut值的下降,同样由于系统反应较灵敏,当转速下降至新的稳态值时也停不下来,而是继续往下冲;于是出现正的偏差电压(ue的极性又一次变号),结果引起ua、edo、n以及ut值的上升;如此周而复始地重复以上现象。可见:在暂态过程中系统的转速是在新稳态值的上下来回振荡的;然而由于系统有阻尼作用,每振荡一次就要消耗一些能量,使得振荡的幅度越来越小;一般经几次振荡后转速就趋于新的稳态值,故系统的暂态响应特性呈现衰减振荡的形式。
|
|
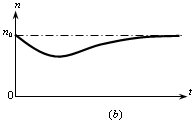
| (2) 非周期过程 | |
若系统的惯性较大、增益又较低时,系统的反应将较迟钝,则当输入信号跃变时系统的输出响应将缓慢地趋于新的稳态值,整个暂态过程呈现非周期变化的形式,如图 1.20 所示。现以给定信号向上的跃变为例简要说明如下:系统的响应过程和上述第“ 1 ” 项相类似;所不同的是由于系统反应迟钝,反馈信号的值始终不会超过给定信号。因此在暂态过程中虽然随着时间的推移反馈信号逐步地增大,偏差信号也逐步地在减小,但它的极性始终不变号(恒为正的)只是幅值越来越小而已,因而系统的暂态响应特性呈现非周期变化的特点。 |
|
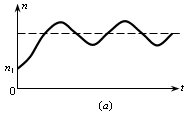
(3)等幅振荡过程 |
|
若系统的惯性较小、增益又较大且无阻尼时,则当输入信号跃变,系统的暂态响应将按振荡规律变化。由于无阻尼作用,这意味着在振荡过程中不消耗能量,从而振荡的幅度不衰减,故系统的暂态响应特性呈现等幅持续振荡的形式,如图 1.21 所示。 |
|
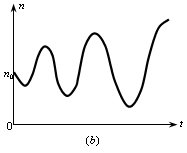
(4)发散振荡过程 |
|
若系统的增益过大(或参数配置不当)时,则在输入信号的作用下系统的输出量不仅振荡而且幅值越来越大,呈现发散振荡的形式,如图 1.22 所示。这时系统根本无法工作,这样的系统叫做不稳定系统。 |
|
| 综上分析, 对自动控制系统的基本要求可归纳为三个方面:第一系统应是稳定的, 这是系统能够工作的前提条件; 第二应具有良好的暂态(响应)特性, 要求系统的暂态过程既要快(即快速性)又要平稳(即平稳性); 第三应具有良好的稳态特性, 在稳态时系统输出量的实际值与期望值之间的误差尽可能小,即系统具有较高的控制准确度或控制精度。简言之, 对自动控制系统的基本要求是稳、快、准。 | |