2.4 实际控制系统数学模型的建立 (动画:相似系统的微分方程) |
| 建模工作的特点是: 既要求对控制理论和所涉及领域控制系统的工作原理以及所使用元部件的特性有较深入的了解,又要求使所建立的数学模型简单实用。因此在建模工作中应妥善处理好以下两个基本关系:
(1) 准确性与实用性 建立控制系统数学模型的基本要求是,具有良好的准确性与简便性,并重在实用。 (2) 线性模型与非线性模型 严格地说,一切实际系统都是非线性的。线性系统只是在忽略了次要的非线性因素后的一种理想化模型。 |
2.4.1 非线性数学模型的线性化 线性化的基本方法是:将非线性函数在平衡状态或参考轨迹附近展开成泰勒级数,只保留线性项从而将非线性模型线性化;而被忽略的泰勒级数的高阶项必须足够小,因此这种方法又称为小信号分析 ( 或小扰动 ) 理论。 1. 非线性静态特性的线性化 将非线性方程 (2.127) 在工作点附近展开成泰勒级数:
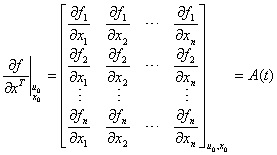
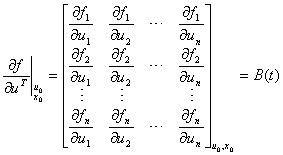
忽略其高次幂项 写成线性模型的习惯表示形式: Y=Kx 2. 非线性微分方程的线性化 将非线性向量函数 f(x , u , t) 在参考状态轨迹附近展开成泰勒级数:
和
为非线性状态方程在参考轨迹处的雅可比 (Jacobi) 矩阵, 从而导出非线性控制系统 (2.129) 在参考轨迹附近的线性化状态方程为
|