|
5.4.2 奈奎斯特稳定判据 (动画:开环系统含积分环节的奈奎斯特围线) 取闭曲线 C 为包围整个右半 S 平面并沿顺时针方向变化的封闭曲线,如图5.13 所示。
图5.13 S平面的D形围线 将F(s) 与闭环系统的特征多项式联系起来,令F(s)=1+Gk(s) ,其中系统的开环传递函数的基本形式如式 (4.7) 所示,即
于是
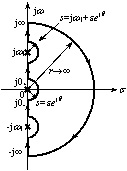
上式表明:这时F(s) 的分母为开环传递函数的分母多项式;F(s) 的分子为闭环系统的特征多项式。于是映射定理 ( 式 (5.29)) 应用到这种情况其具体含义是:F(s) 在右半开平面内的极点数P,就是分布在右半开平面内的开环极点数;F(s) 在右半开平面内的零点数Z,就是分布在右半开平面内的系统极点数。而由 3.4.1 小节可知:要使闭环系统稳定,系统极点必须均分布在S的左半开平面上,或者说不能有系统极点落在右半开平面内,即Z=0 。这样由映射定理便可导出反馈控制系统的稳定性判据。 1. 奈奎斯特稳定判据 说明如下: (1) 函数 1+Gk(s) 的图象包围坐标原点的周数,等于Gk(s) 的图象包围 (-1,j0) 点的周数。 (2) 可用开环频率特性曲线Gk(jω) 取代Gk(s) 的图象, 来判断闭环系统的稳定性。 (3) 若有系统极点分布在虚轴上,则Gk(jω) 曲线将穿过 (-1,j0) 点。 (4) 若有开环极点分布在虚轴上,则应采用广义D形围线。如图5.14 所示。 这时位于虚轴上的开环极点 ( 包括位于原点上的开环极点 ) 均作为分布在左半平面上看待。
图5.14 S平面的广义D形围线 这样由映射定理 ( 式(5.29)) ,则可导出奈奎斯特稳定判据如下: (1) 若 Z=0 由式(5.29) 可得N =P。这就是说: 如果系统在右半开S平面上有P个开环极点时,则闭环系统稳定的充要条件为,当ω从 -∞变化至 + ∞时开环频率特性曲线Gk(jω)逆时针方向包围临界点 (-1,j0)P周。 (2) 若N≠P 由式(5.29) 可得Z =P-N。这就是说: 如果Gk(jω) 曲线 (-∞<ω<∞) 包围临界点的周数N不等于系统在右半开平面上的开环极点数P,则闭环系统不稳定,而且分布在右半开平面上的系统极点个数为Z =P-N。 (3) 若闭环系统临界稳定,则Gk(jω) 曲线将穿过临界点。 应用奈氏判据确定闭环系统稳定性的实用方法 由于Gk(jω) 与Gk(-jω)(0≤ω<∞ ) 是复共轭的,它们的图形是关于实轴对称的。因此实际应用时可以加以简化:只绘制 0≤ω<∞的开环频率特性曲线G(jω),并根据它对临界点 (-1,j0) 的包围周数Nh来判断闭环系统的稳定性。 由于 0≤ω<∞的G(jω) 曲线对临界点的包围周数Nh,只有 - ∞<ω<∞开环频率特性曲线对临界点包围周数N的一半。因此,只要令N =2Nh,并将映射定理 ( 式(5.29)) 改写成下列形式 Z =P–2Nh (5.32) 如果系统的开环传递函数含有ν个积分环节,则在绘制ω从 0+ 变化至∞的开环频率特性曲线Gk(jω)后,应从Gk(j0+) 点开始沿逆时针方向补画半径为无穷大、绕过ν×90 °的圆弧。 |

 (5.30)
(5.30)  (5.31)
(5.31)